
Sensor Data Integrity Verification
Introduction
- Focus on integrating and verifying sensor data for autonomous vehicle (AV) safety.
- Aiming to enhance AV reliability and safety.
Project Overview
- Integration of infrared and ultrasonic sensors into AVs.
- Objective: Ensure the integrity and accuracy of sensor data.
CAD Modifications and Sensor Integration
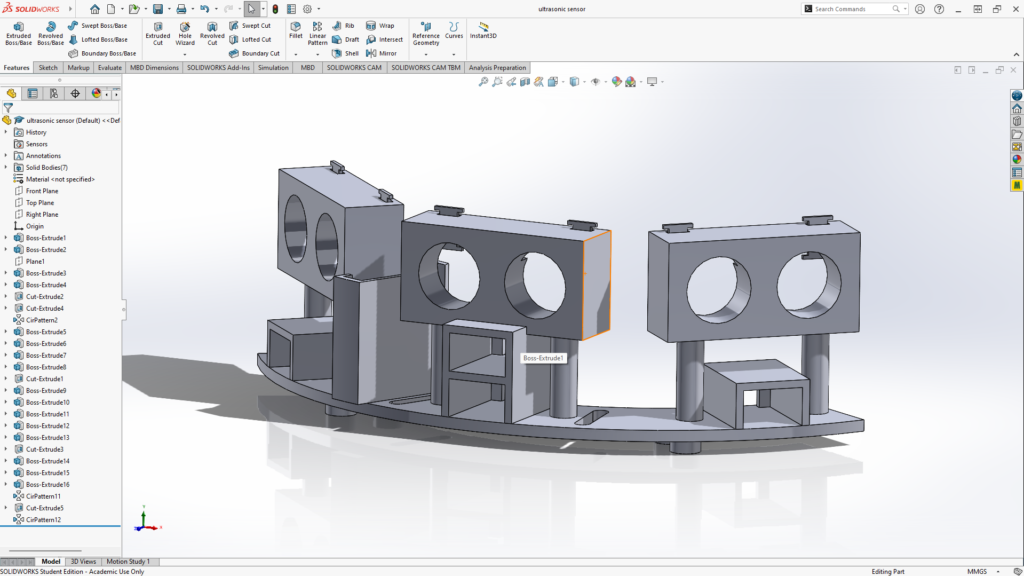
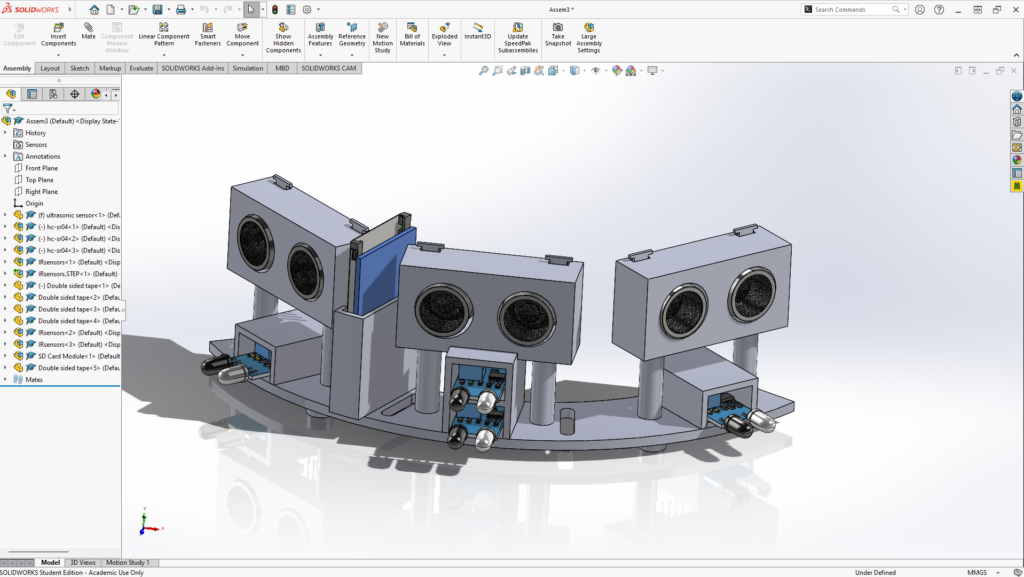
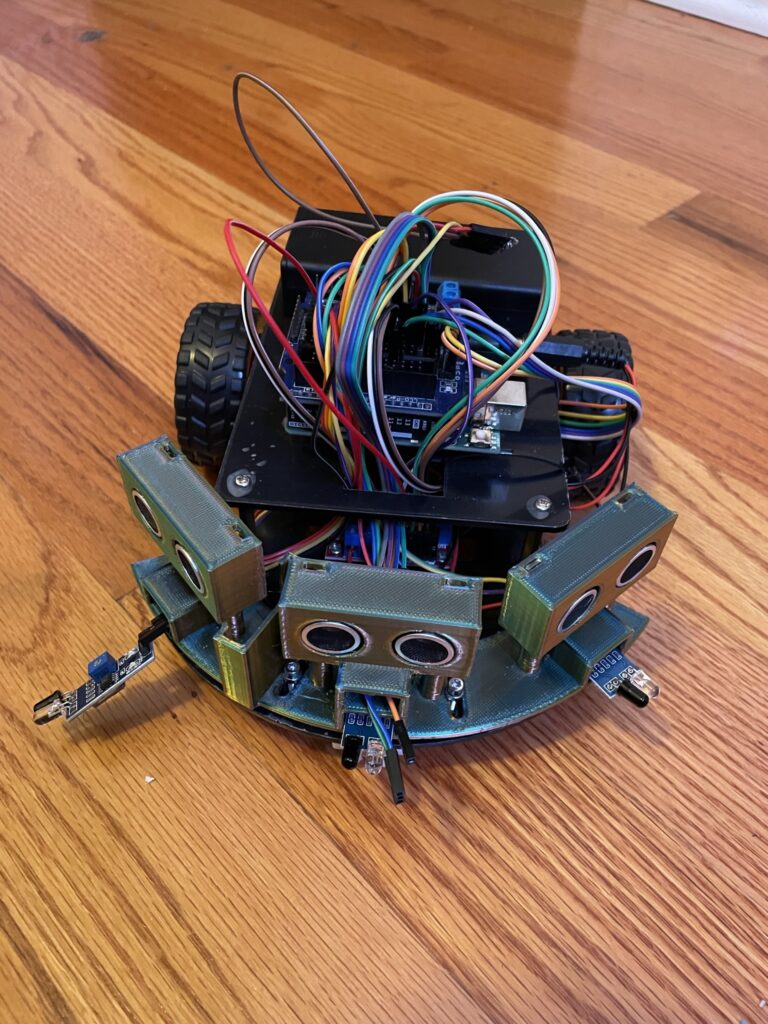
- Custom 3D-printed platform designed using Solidworks.
- Configuration: 3 ultrasonic sensors, 3 infrared sensors, an alarm, and an SD card module.
- Intentional inadequate calibration of top middle infrared sensors for anomaly checks.
- A simplified control algorithm was developed due to the complexity of the initial approach.
Challenges and Solutions
- Balance between obstacle avoidance and goal-directed movement.
- Fine-tuning algorithm values for optimal functionality.
Implementation and Testing
- Real-time decision-making based on sensor readings.
- Algorithm guides movement, obstacle detection, and anomaly response.
Normal working scenario
Failure test scenario
Results and Impact
- Demonstrated the importance of sensor data integrity in AVs.
- Enhanced safety and reliability of autonomous operations.
Conclusion
The “Sensor Data Integrity Verification for Autonomous Vehicles with Infrared and Ultrasonic Sensors” project exemplifies the integration of multiple sensor technologies to improve AV safety and reliability. The CAD modifications and development of a simplified control algorithm were critical in achieving this goal, paving the way for safer and more reliable autonomous driving experiences.